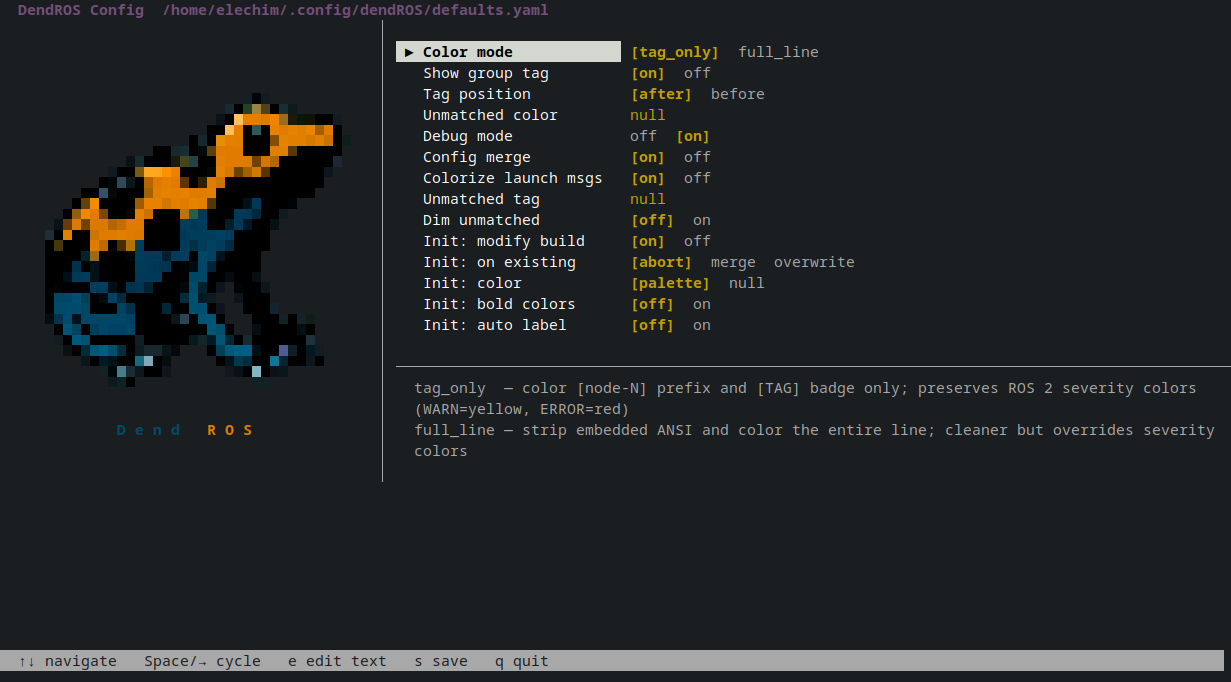
dendros config opens a full-screen interactive TUI for managing global defaults.
dendrosconfig
Settings are written to ~/.config/dendROS/defaults.yaml and apply across all packages as a baseline. Per-package dendROS.yamldefaults: sections override them.
Show [TAG] badges in ros2 launch and ros2 run output. Overridable per-group with show_tag: false.
Tag position
after / before
Badge position: after → [node-N] [TAG] … · before → [TAG] [node-N] ….
Tag style
normal / inverted
normal = colored text on default background. inverted = colored background with empty letters (like crash alert banners). Overridable per-group with tag_style:.
Colorize launch msgs
on / off
When off, [INFO] [node-N]: process started … lines pass through unchanged.
CLI commands
Setting
Values
Description
Show tag (CLI)
on / off
Show [TAG] badges in ros2 node list, ros2 node info, ros2 service list, ros2 action list, and ros2 topic list.
Show default services
on / off
When off, standard ROS 2 system services (set_parameters, get_parameters, get_loggers, …) are hidden from ros2 service list output entirely. When on, they appear dimmed.
Topic list sort
default / group
default preserves ros2's alphabetical order. group places system topics first, then groups topics by their publisher's color group (groups in first-occurrence order, alphabetical within each group), with unmatched topics last. See ros2 topic list.
Unmatched nodes
Setting
Values
Description
Unmatched color
color / null
Color for nodes not in any group. null = pass through.
Unmatched tag
string / null
Badge for unmatched nodes (e.g. ? → [?]). Requires unmatched_color.
Dim unmatched
on / off
Dim unmatched nodes. Only when unmatched_color is null.
System
Setting
Values
Description
Debug mode
on / off
Print config summary to stderr on startup. Equivalent to DENDROS_DEBUG=1.
Config merge
on / off
Parse launch files for referenced packages and merge their configs.
Crash alert
Setting
Values
Description
Crash alert
on / off
Print an inline banner when a node dies unexpectedly. See Crash Alert.
Crash alert color
node / red
node uses the group color; red always uses bold red.
Crash alert interval
integer (seconds)
Seconds between periodic banner reprints. 0 = only on new crash events.
Traceback
Setting
Values
Description
Traceback color
fancy / red / off
fancy = bold red header + dim red frames; red = all bold red; off = passthrough. See Traceback Highlighting.
Parameter change alert
Setting
Values
Description
Param change alert
on / off
Print an inline notification whenever a node's parameter changes at runtime. See Parameter Change Alert.
Param alert scope
tracked / all
tracked = only nodes with a config group; all = entire ROS graph.
Param alert style
inline / inverted
inline = compact colored line; inverted = full white-background strip, harder to miss in busy logs.